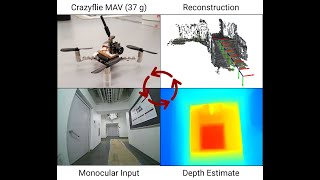
towards domain independence for learning-based monocular depth estimation for drones
Published 7 years ago • 1.8K plays • Length 3:37Download video MP4
Download video MP3
Similar videos
-
 1:51
1:51
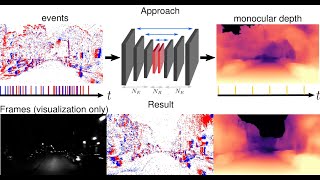
learning monocular dense depth from events (3dv 2020)
-
 23:45
23:45
learning vision-based agile drone flight: from simulation to reality
-
 2:03
2:03
active autonomous aerial exploration for ground robot path planning
-
 7:26
7:26
geometry-aware compensation scheme for morphing drones (icra 2021 video pitch)
-
 2:32
2:32
the foldable drone: a morphing quadrotor that can squeeze and fly
-
 1:26:23
1:26:23
human-level performance with autonomous vision-based drones - davide scaramuzza
-
 4:00
4:00
hdvio: improving localization and disturbance estimation with hybrid dynamics vio (rss 2023)
-
 1:28
1:28
onboard detection and localization of uavs using depth maps
-
 1:01
1:01
fast autonomous flight of a vision-based quadrotor
-
 2:07
2:07
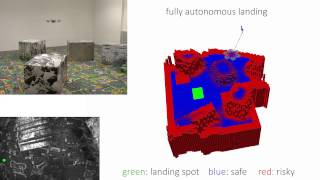
autonomous quadrotor landing using continuous on-board monocular-vision-based elevation mapping
-
 8:23
8:23
(preview) mononav: mav navigation via monocular depth estimation and reconstruction
-
 8:37
8:37
how to use 4d models in hammer missions
-
 1:38
1:38
appearance-based active, monocular, dense reconstruction for micro aerial vehicles
-
 0:32
0:32
adaptable sensor system's first flight
-
 1:41
1:41
agilicious: open-source and open-hardware agile quadrotor for vision-based flight (science robotics)
-
 1:51
1:51
air-ground localization and map augmentation using monocular dense reconstruction