fast autonomous flight of a vision-based quadrotor
Published 8 years ago • 4.7K plays • Length 1:01Download video MP4
Download video MP3
Similar videos
-
 3:11
3:11
vision based autonomous quadrotor landing on a moving platform
-
 1:36
1:36
autonomous vision-based flight over a disaster zone
-
 2:22
2:22
learning high-speed flight in the wild (science robotics, 2021)
-
 1:41
1:41
agilicious: open-source and open-hardware agile quadrotor for vision-based flight (science robotics)
-
 2:18
2:18
autonomous quadrotor flight despite rotor failure with onboard vision sensors: frames vs events
-
 23:45
23:45
learning vision-based agile drone flight: from simulation to reality
-
 2:20
2:20
how to launch a quadrotor
-
 3:05
3:05
event-based vision for autonomous high-speed robotics
-
 2:07
2:07
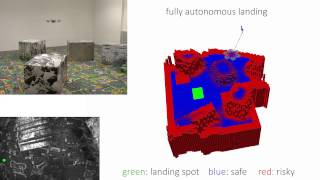
autonomous quadrotor landing using continuous on-board monocular-vision-based elevation mapping
-
 12:11
12:11
faster than fast: gpu-accelerated frontend for high-speed vio (iros 2020)
-
 4:51
4:51
champion-level drone racing using deep reinforcement learning (nature, 2023)
-
 2:26
2:26
time-optimal planning for quadrotor waypoint flight (science robotics 2021)
-
 1:03
1:03
autonomous, flying 3d scanner
-
 2:13
2:13
are we ready for autonomous drone racing? the uzh-fpv drone racing dataset
-
 6:45
6:45
rapid exploration with multi-rotors: a frontier selection method for high speed flight
-
 3:27
3:27
reinforcement learning meets visual odometry (eccv 2024)
-
 1:49
1:49
deep drone racing: from simulation to reality with domain randomization
-
 1:07
1:07
autotune: controller tuning for high-speed flight