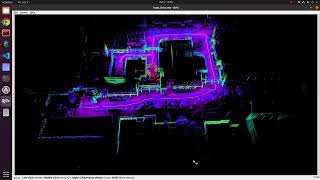
unified multi-modal landmark tracking for tightly coupled lidar-visual-inertial odometry
Published 3 years ago • 2.2K plays • Length 3:01Download video MP4
Download video MP3
Similar videos
-
![ra-l/icra 2021 - unified landmark tracking for odometry [finalist icra best student paper]](https://i.ytimg.com/vi/l3XSGIpQP3Q/mqdefault.jpg) 11:25
11:25
ra-l/icra 2021 - unified landmark tracking for odometry [finalist icra best student paper]
-
 1:28
1:28
dynamic lidar inertial odometry with the ross robotics extrm robot
-
 7:12
7:12
vilens: visual, inertial, lidar, and leg odometryfor all-terrain legged robots
-
 1:57
1:57
newer college dataset - handheld lidar, inertial and vision with ground truth
-
 5:20
5:20
vimo: simultaneous visual inertial model-based odometry and force estimation (rss 2019)
-
 1:04
1:04
demo of fast-lio: a fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman
-
 8:42
8:42
optimizing long-term robot tracking with multi-platform sensor fusion
-
 0:51
0:51
multi-contact planning and control for a torque-controlled humanoid robot
-
 0:57
0:57
oxford anymal using laser mapping to autonomously navigate
-
 1:50
1:50
world's first 3-in-1 multi-modal biped robot, tron1
-
 1:23
1:23
automated logistics demo - fleet software for multiple robots
-
 0:29
0:29
fast line follower robot
-
 1:01
1:01
visual-inertial-wheel odometry with online calibration
-
 1:22
1:22
fully automatic robotic tracking of uncertain contours
-
 0:47
0:47
multi robot system simulation
-
 1:09
1:09
a fully-integrated sensing and control system for high-accuracy mobile robotic building construction
-
 0:41
0:41
dynamic tracking
-
 2:07
2:07
universal light measurement with kuka robots