dynamically reconfigurable discrete distributed stiffness for inflated beam robots
Published 4 years ago • 523 plays • Length 2:16Download video MP4
Download video MP3
Similar videos
-
 9:20
9:20
dynamically reconfigurable discrete distributed stiffness for inflated beam robots
-
 11:12
11:12
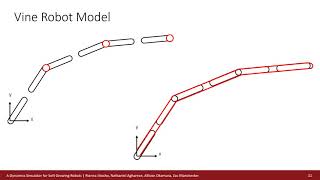
a dynamics simulator for soft growing robots
-
 0:24
0:24
proact: sequential end-effector control of a virtual prosthetic arm
-
 1:31
1:31
hapwrap: soft growing wearable haptic device
-
 3:00
3:00
a tip-extending soft robot enables reconfigurable and deployable antennas
-
 1:18
1:18
a 3-d printed functionally graded soft robot
-
 56:00
56:00
stanford seminar - computational design of compliant, dynamical robots, cynthia sung
-
 2:58
2:58
a multi-segment, soft growing robot with selective steering
-
 1:01
1:01
a tip mount for transporting sensors and tools using soft growing robots
-
 6:54
6:54
robotics and embodied ai lab (realab) at stanford university
-
 28:02
28:02
next-gen sensor fusion for next-gen sensors and driving functions
-
 1:03
1:03
robotic logistics | robot mounted 3d camera example - by zivid
-
 2:05
2:05
a stimuli-responsive nanocomposite for 3d anisotropic cell-guidance and magnetic soft robotics
-
 3:22
3:22
learning material parameters and hydrodynamics of soft robotic fish via differentiable simulation
-
 2:04
2:04
dynamically decoupling base and end-effector motion for mobile manipulation