autonomous quadrotor flight despite rotor failure with onboard vision sensors: frames vs events
Published 3 years ago • 31K plays • Length 2:18Download video MP4
Download video MP3
Similar videos
-
 1:01
1:01
fast autonomous flight of a vision-based quadrotor
-
 2:20
2:20
how to launch a quadrotor
-
 4:08
4:08
neurobem: hybrid aerodynamic quadrotor model (rss 2021)
-
 2:07
2:07
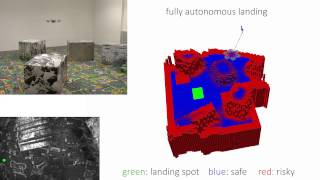
autonomous quadrotor landing using continuous on-board monocular-vision-based elevation mapping
-
 17:08
17:08
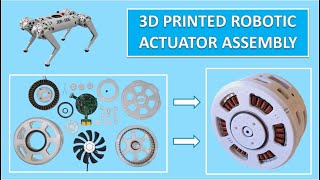
3d printed robot actuator assembly
-
 20:43
20:43
top 12 personal vtol aircraft | best ultralight flying vehicles
-
 2:22
2:22
learning high-speed flight in the wild (science robotics, 2021)
-
 1:41
1:41
agilicious: open-source and open-hardware agile quadrotor for vision-based flight (science robotics)
-
 1:03
1:03
autonomous, flying 3d scanner
-
 2:32
2:32
the foldable drone: a morphing quadrotor that can squeeze and fly
-
 3:11
3:11
vision based autonomous quadrotor landing on a moving platform
-
 1:40
1:40
autonomous, live, dense 3d mapping of an outdoor mock-up disaster zone with a quadrotor mav
-
 2:26
2:26
time-optimal planning for quadrotor waypoint flight (science robotics 2021)
-
 0:26
0:26
quadrotor: in-flight collision avoidance
-
 1:36
1:36
autonomous vision-based flight over a disaster zone
-
 5:50
5:50
towards low-latency high-bandwidth control of quadrotors using event cameras (icra 2020 video pitch)
-
 0:53
0:53
iros 2017 autonomous drone race: vision-based navigation running fully onboard
-
 4:28
4:28
a benchmark comparison of learned control policies for agile quadrotor flight (icra 2022)
-
 1:27
1:27
aggressive maneuvers for autonomous quadrotor flight
-
 2:19
2:19
weighted maximum likelihood for controller tuning (icra 2023)