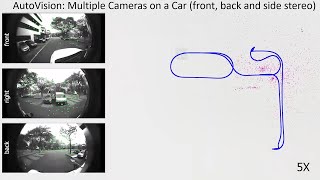
benefit of large field-of-view cameras for visual odometry
Published 8 years ago • 6.2K plays • Length 0:56Download video MP4
Download video MP3
Similar videos
-
 6:31
6:31
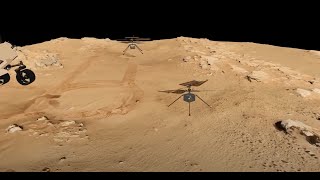
exploring event camera-based odometry for planetary robots (ral-iros 2022)
-
 3:00
3:00
a benchmark comparison of monocular visual-inertial odometry algorithms for flying robots
-
 3:23
3:23
high speed and high dynamic range video with an event camera
-
 3:21
3:21
active exposure control for robust visual odometry in high dynamic range (hdr) environments
-
 3:04
3:04
evo: event-based visual odometry (ral'17)
-
 0:49
0:49
the event-camera dataset and simulator
-
 1:00
1:00
low-latency visual odometry using event-based feature tracks
-
 3:48
3:48
continuous-time vs. discrete-time vision-based slam: a comparative study (ra-l 2022)
-
 3:42
3:42
learned inertial odometry for autonomous drone racing (ral 2023 narrated)
-
 1:28
1:28
svo with 4 cameras and remode-cpu
-
 3:15
3:15
event-aided direct sparse odometry (cvpr 2022, oral)
-
 18:54
18:54
event cameras: opportunities and the road ahead (cvpr 2020)
-
 3:05
3:05
event-based vision for autonomous high-speed robotics
-
 6:15
6:15
redesigning slam for arbitrary multi-camera systems
-
 4:11
4:11
fisher information field: an efficient and differentiable map for perception-aware planning
-
 5:20
5:20
vimo: simultaneous visual inertial model-based odometry and force estimation (rss 2019)
-
 1:01
1:01
fast autonomous flight of a vision-based quadrotor
-
 1:10
1:10
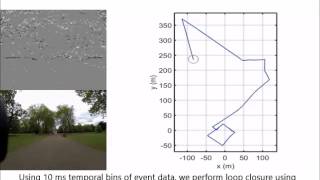
towards visual slam with event-based cameras
-
 2:53
2:53
data-efficient decentralized visual slam (icra18 video teaser)