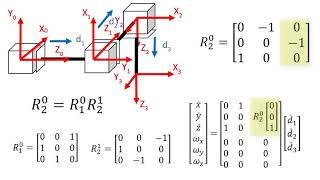
robotics 2 u1 (kinematics) s3 (jacobian matrix) p1 (intro and lab)
Published 6 years ago • 39K plays • Length 26:36Download video MP4
Download video MP3
Similar videos
-
 16:41
16:41
robotics 2 u1 (kinematics) s3 (jacobian matrix) p2 (finding the jacobian)
-
 13:43
13:43
robotics 2 u1 (kinematics) s4 (path planning) p1 (using the jacobian)
-
 10:04
10:04
2 2 1 lecture video 1 of 6 jacobian matrix explanation
-
 22:01
22:01
robotics 1 u1 (kinematics) s3 (rotation matrices) p1 (rotation matrices)
-
 22:16
22:16
robotics 1 u1 (kinematics) s1 (preliminaries) p2 (soldering and kit assembly)
-
 32:11
32:11
robotics: lecture 7: manipulator jacobian part 1
-
 9:10
9:10
5. jacobians (iros 2020 tutorial series)
-
 46:13
46:13
robotics 1 u1 (kinematics) s6 (inverse kinematics) p1 (inverse kinematics)
-
 27:05
27:05
robotics 1 u1 (kinematics) s3 (rotation matrices) p3 (rotation matrix examples)
-
 6:41
6:41
robotics 2 u1 (kinematics) s6 (parallel manipulators) p1 (introduction)
-
 2:20
2:20
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p1 (intro)
-
 3:59
3:59
1 1 3 lecture video 1 of 4 intro to the homogeneous transformation matrix
-
 10:54
10:54
robotics 1 u3 (motion control) s3 (on-off vs linear) p1 (stabilizing on-off control)
-
 7:42
7:42
2 2 1 lecture video 4 of 6 jacobian matrix explanation
-
 13:09
13:09
robotics 2 u1 (kinematics) s6 (parallel manipulators) p2 (inverse kinematics)
-
 7:12
7:12
robotics 1 u1 (kinematics) s4 (displacement vectors) p3 (displacement vectors in python)