robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p1 (intro)
Published 6 years ago • 83K plays • Length 2:20Download video MP4
Download video MP3
Similar videos
-
 15:21
15:21
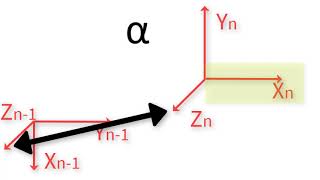
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p2 (frames)
-
 53:50
53:50
robotics 1 u1 (kinematics) s2 (kinematic diagrams) p1 (denavit-hartenberg frames)
-
 15:19
15:19
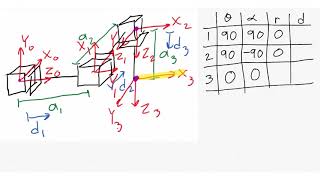
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p3 (parameter table)
-
 26:36
26:36
robotics 2 u1 (kinematics) s3 (jacobian matrix) p1 (intro and lab)
-
 30:16
30:16
robotics 1 u1 (kinematics) s5 (htm) p2 (htm by denavit hartenberg)
-
 0:50
0:50
kinematics | 6-dof motion platform (this is not cgi)
-
 5:51
5:51
inverse kinematics. explaining every step
-
 3:20
3:20
birdbot, an energy-efficient robot leg inspired by birds' legs
-
 1:34
1:34
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p4 (htm)
-
 4:58
4:58
2 1 2 lecture video 1 of 4 denavit hartenberg intro
-
 6:41
6:41
robotics 2 u1 (kinematics) s6 (parallel manipulators) p1 (introduction)
-
 11:44
11:44
denavit - hartenberg (dh) tables for robotic systems - direct kinematics ii
-
 5:21
5:21
introduction to dh convention
-
 36:41
36:41
robotics 1 u1 (kinematics) s2 (kinematic diagrams) p2 (set the angles of servos)
-
 36:26
36:26
robotics 1 u1 (kinematics) s5 (htm) p3 (denavit hartenberg examples)
-
 26:19
26:19
robotics 2 u1 (kinematics) s5 (inverse kinematics) p2 (procedure and programming)