the jacobian matrix in robotics & python - denavit hartenberg & universal robots
Published 2 years ago • 3.6K plays • Length 14:40Download video MP4
Download video MP3
Similar videos
-
 16:41
16:41
robotics 2 u1 (kinematics) s3 (jacobian matrix) p2 (finding the jacobian)
-
 8:26
8:26
denavit–hartenberg parameters of a 3-link manipulator with prismatic joint - example
-
 21:44
21:44
jacobian of robot | part 12 - programming robot mechanics
-
 9:58
9:58
how to find jacobian matrix? | solved examples | robotics 101
-
 9:07
9:07
velocity kinematics & jacobian matrix | robotics 101
-
 27:14
27:14
what is jacobian? | the right way of thinking derivatives and integrals
-
 11:01
11:01
2 1 2 lecture video 2 of 4 denavit hartenberg parameters
-
 6:36
6:36
2 2 1 lecture video 2 of 6 jacobian matrix explanation
-
 11:37
11:37
manipulator jacobian of robot (intro2robotics lecture 12a)
-
 20:21
20:21
jacobian matrix and singularities | robotics | introduction | part 1
-
 22:42
22:42
robotics 1 u1 (kinematics) s5 (htm) p4 (denavit hartenberg in python)
-
 11:09
11:09
jacobian matrix in robotics
-
 13:43
13:43
robotics 2 u1 (kinematics) s4 (path planning) p1 (using the jacobian)
-
 4:19
4:19
2 2 2 lecture video 3 of 3 jacobian matrix examples
-
 26:36
26:36
robotics 2 u1 (kinematics) s3 (jacobian matrix) p1 (intro and lab)
-
 2:20
2:20
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p1 (intro)
-
 10:15
10:15
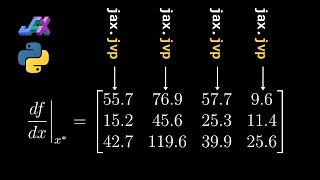
full jacobian matrix using forward-mode ad in jax