a benchmark comparison of monocular visual-inertial odometry algorithms for flying robots
Published 6 years ago • 24K plays • Length 3:00Download video MP4
Download video MP3
Similar videos
-
 3:00
3:00
a benchmark comparison of monocular visual-inertial odometry algorithms for flying robots
-
 3:42
3:42
learned inertial odometry for autonomous drone racing (ral 2023 narrated)
-
 1:42
1:42
learned inertial odometry for autonomous drone racing (ral 2023)
-
 5:20
5:20
vimo: simultaneous visual inertial model-based odometry and force estimation (rss 2019)
-
 2:46
2:46
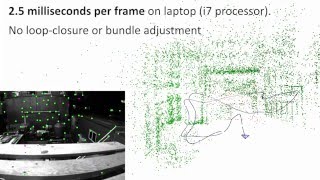
svo: fast semi-direct monocular visual odometry (tro'17, icra'14)
-
 3:48
3:48
continuous-time vs. discrete-time vision-based slam: a comparative study (ra-l 2022)
-
 4:43
4:43
reaching the limit in autonomous racing: optimal control versus reinforcement learning (scirob 23)
-
 17:57
17:57
ocr model comparison | tesseract ocr, easyocr, keras-ocr, paddle ocr, mmocr, ocr-sam
-
 4:51
4:51
champion-level drone racing using deep reinforcement learning (nature, 2023)
-
 0:56
0:56
benefit of large field-of-view cameras for visual odometry
-
 6:50
6:50
data-efficient collaborative decentralized thermal-inertial odometry (ral-iros 2022)
-
 0:51
0:51
visual inertial state estimation at 20m/s on darpa fla drone with svo 2.0
-
 1:25
1:25
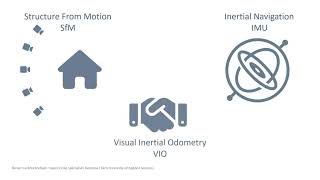
visual inertial odometry
-
 13:22
13:22
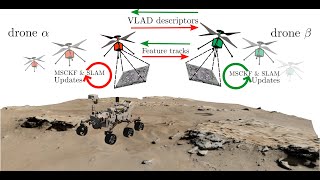
cooperative visual-inertial odometry - icra 2021 presentation
-
 3:03
3:03
svo 2.0: semi-direct visual odometry for monocular and multi-camera systems
-
 3:03
3:03
real-time visual-inertial odometry for event cameras using keyframe-based nonlinear optimization
-
 1:00
1:00
low-latency visual odometry using event-based feature tracks