learned inertial odometry for autonomous drone racing (ral 2023 narrated)
Published 9 months ago • 5K plays • Length 3:42Download video MP4
Download video MP3
Similar videos
-
 1:42
1:42
learned inertial odometry for autonomous drone racing (ral 2023)
-
 4:51
4:51
champion-level drone racing using deep reinforcement learning (nature, 2023)
-
 4:43
4:43
reaching the limit in autonomous racing: optimal control versus reinforcement learning (scirob 23)
-
 2:54
2:54
autonomous drone racing with deep reinforcement learning (iros 2021)
-
 4:00
4:00
hdvio: improving localization and disturbance estimation with hybrid dynamics vio (rss 2023)
-
 3:00
3:00
a benchmark comparison of monocular visual-inertial odometry algorithms for flying robots
-
 4:59
4:59
alphapilot: autonomous drone racing (rss 2020 video pitch)
-
 2:22
2:22
learning high-speed flight in the wild (science robotics, 2021)
-
 2:31
2:31
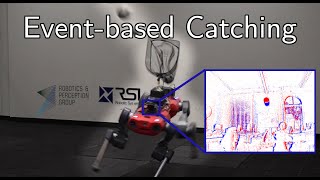
event-based agile object catching with a quadrupedal robot (icra 2023)
-
 2:19
2:19
weighted maximum likelihood for controller tuning (icra 2023)
-
 0:51
0:51
visual inertial state estimation at 20m/s on darpa fla drone with svo 2.0
-
 1:01
1:01
fast autonomous flight of a vision-based quadrotor
-
 6:00
6:00
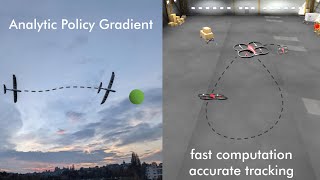
training efficient controllers via analytic policy gradient (icra 2023)
-
 2:47
2:47
learning minimum-time flight in cluttered environments (ral 2022)
-
 1:25
1:25
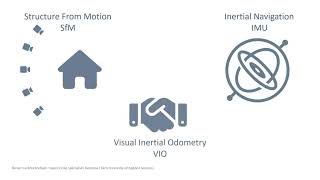
visual inertial odometry
-
 3:48
3:48
continuous-time vs. discrete-time vision-based slam: a comparative study (ra-l 2022)